Yersel Lazer Tarama ve Nokta Bulutu
Yersel Lazer Tarama ve Nokta Bulutu için temel kavramları, uygulama adımları ve kritik mühendislik kontrollerini özetleyen pratik rehber.
Yapıdan Editör Kurulu · Editoryal kaynak kontrolündeEditoryal kaynak kontrolü kaydı varAyrıntılar
- Hazırlayan
- Yapıdan Editör Kurulu
- Teknik/Editoryal kontrol
- Teknik doğrulama bekliyor
- Son kontrol tarihi
- Teknik doğrulama bekliyor
- İçerik sürümü
- 3.0
- Kaynak durumu
- Editoryal kaynak kontrolü kaydı var
Sorumluluk/kapsam: Bu içerik genel bilgilendirme ve editoryal kaynak kontrolü amacıyla hazırlanır; proje, saha veya uygulama kararı için yetkili mühendis/kurum değerlendirmesinin yerine geçmez.
Yersel Lazer Tarama (Terrestrial Laser Scanning — TLS), lazer ışını ile bir yapı veya alanı milyonlarca ölçüm noktasıyla saniyeler içinde sayısallaştıran, temassız üç boyutlu ölçme teknolojisidir. Elde edilen nokta bulutu (point cloud), inşaat takibi, as-built dokümantasyonu, yapısal hasar tespiti ve BIM entegrasyonunda yaygın biçimde kullanılmaktadır. Türkiye'de büyük ölçekli harita üretiminde BÖHHBÜY 2018 kapsamında tüm ölçme verilerinin TUREF (Türkiye Ulusal Referans Çerçevesi / ITRF96) koordinat sistemine dayalı üretilmesi zorunludur. Cihaz performansı ISO 17123-9:2018 standardı çerçevesinde saha testleriyle değerlendirilmekte; veri kalitesi ise ISO 19157-1:2023'e göre raporlanmaktadır.

TLS cihazı tripod üzerinde konumlandırılmış olarak devam eden bir inşaat projesinde as-built ölçme gerçekleştiriyor; Phase-Shift yöntemiyle ±2 mm doğrulukta 2 milyon…
Ayrıntılı açıklamayı göster
TLS cihazı tripod üzerinde konumlandırılmış olarak devam eden bir inşaat projesinde as-built ölçme gerçekleştiriyor; Phase-Shift yöntemiyle ±2 mm doğrulukta 2 milyon nokta/saniye kayıt yapılabilir.
1. Çalışma Prensibi
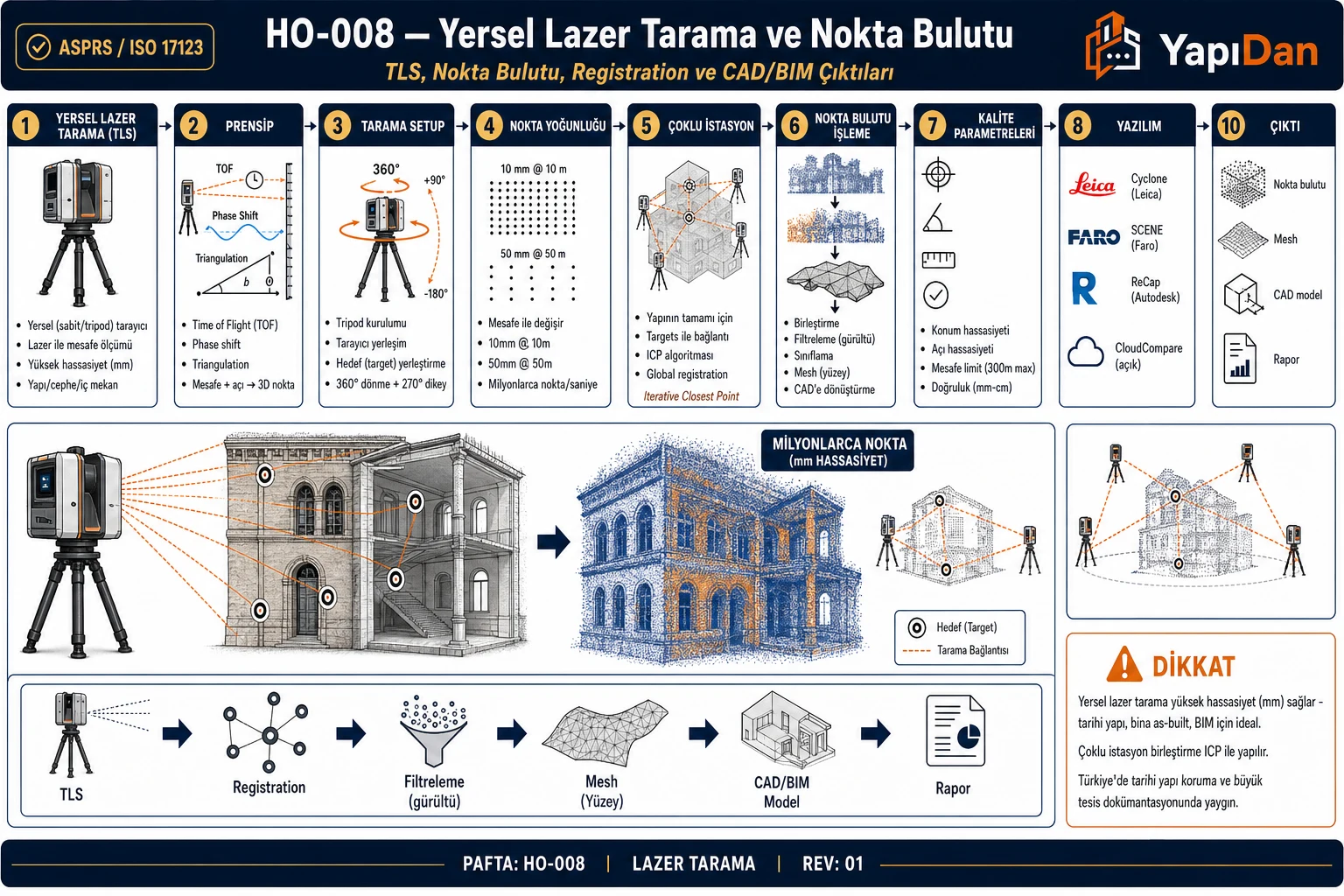
TLS prensibi (Time of Flight d=c·t/2, phase shift, triangulation) → tripod setup + targets → 360°/270° tarama → çoklu istasyon ICP birleştirme → nokta bulutu işleme…
Ayrıntılı açıklamayı göster
TLS prensibi (Time of Flight d=c·t/2, phase shift, triangulation) → tripod setup + targets → 360°/270° tarama → çoklu istasyon ICP birleştirme → nokta bulutu işleme (filtreleme, sınıflama, mesh) → kalite (mm-cm hassasiyet) → uygulama (BIM, as-built, tarihi yapı) (ASPRS / ISO 17123).
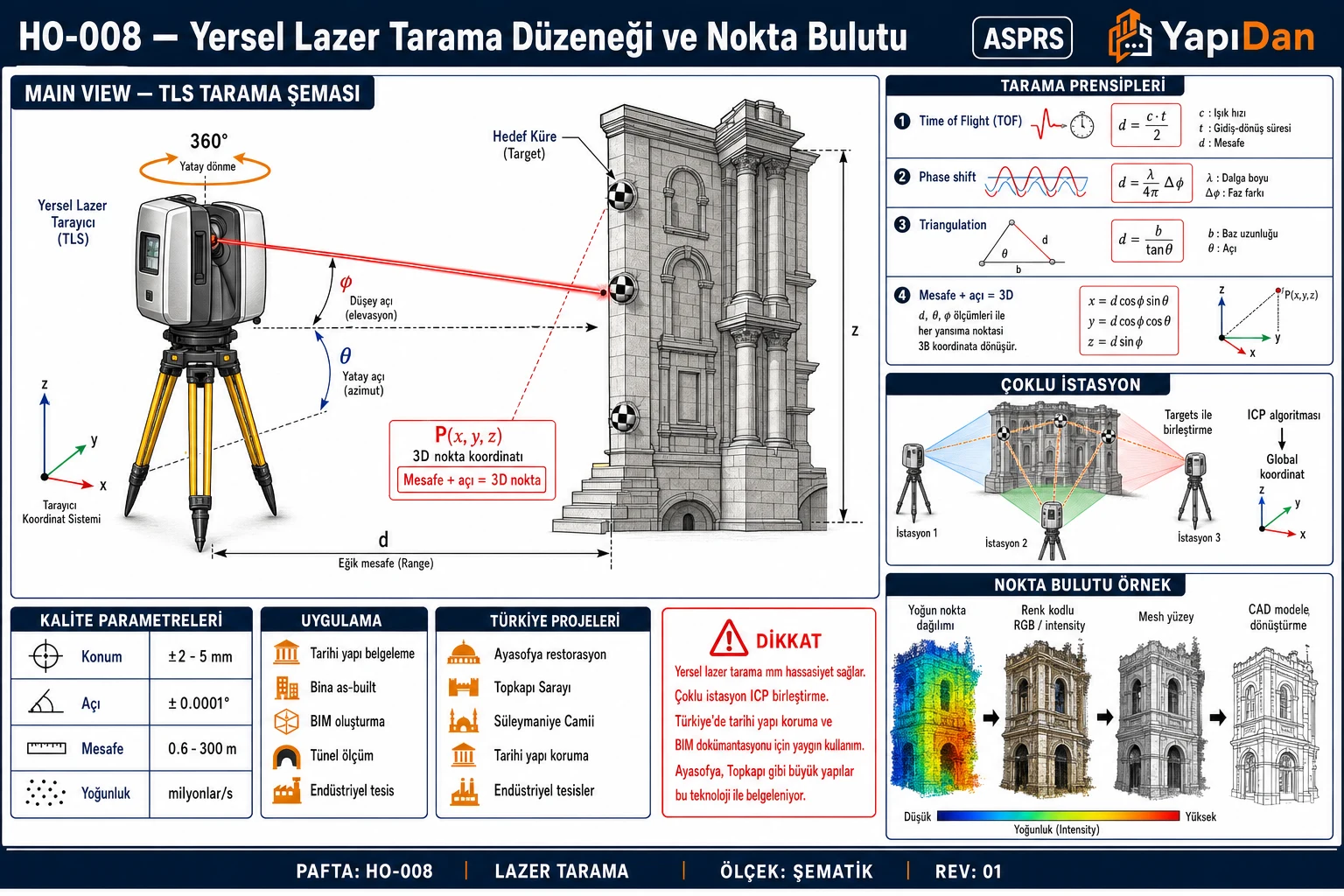
TLS tarama şeması (tripod + tarayıcı 360°, lazer ışını + targets); tarama prensipleri (TOF, phase shift, triangulation); çoklu istasyon ICP birleştirme; nokta bulutu örnek…
Ayrıntılı açıklamayı göster
TLS tarama şeması (tripod + tarayıcı 360°, lazer ışını + targets); tarama prensipleri (TOF, phase shift, triangulation); çoklu istasyon ICP birleştirme; nokta bulutu örnek (renk kodlu RGB/intensity, mesh, CAD); kalite parametreleri (±2-5mm konum, 0.6-300m mesafe); Türkiye projeleri (Ayasofya, Topkapı, Süleymaniye).
1.1 Mesafe Ölçüm Yöntemleri
TLS cihazları üç temel yöntemle mesafe ölçer; yöntem seçimi proje ölçeğine ve gereken doğruluğa göre belirlenir:
| Yöntem | Prensip | Menzil | Doğruluk | Tipik Uygulama |
|---|---|---|---|---|
| Time-of-Flight (ToF) | Lazer darbesi gidiş-dönüş süresi | 1–600 m | ±5–10 mm | Dış mekan, köprü, altyapı |
| Phase-Shift (Faz) | Sürekli lazer dalga faz farkı | 1–150 m | ±1–3 mm | İç mekan, endüstriyel tesis |
| Triangülasyon | Lazer-kamera geometrisi | 0,1–5 m | ±0,1–0,5 mm | Kısa menzil, kalıp kontrol |
Saha Notu: Türkiye inşaat sahalarında uygulamaların %70'inden fazlası Phase-Shift yöntemiyle çalışan orta sınıf cihazlarla (Leica RTC360, FARO Focus) gerçekleştirilmektedir. Açık alanlarda ve uzun menzilli köprü/tünel projelerinde ToF yöntemi tercih edilmelidir. Phase-Shift yönteminde ±150 m menzil sınırı aşıldığında aralıklı okuma hatası (ambiguity error) oluşabilir; büyük dış mekan projelerinde istasyon aralığı cihaz menziline göre planlanmalıdır.

Phase-Shift yöntemiyle çalışan orta sınıf TLS cihazı; 130 m menzil, ±2 mm mesafe doğruluğu ve 1 milyon nokta/saniye ölçüm hızıyla iç mekan ve tarihi yapı dokümantasyonunda yaygın…
Ayrıntılı açıklamayı göster
Phase-Shift yöntemiyle çalışan orta sınıf TLS cihazı; 130 m menzil, ±2 mm mesafe doğruluğu ve 1 milyon nokta/saniye ölçüm hızıyla iç mekan ve tarihi yapı dokümantasyonunda yaygın kullanım alanı bulmaktadır.
1.2 Tarama Sistemi Bileşenleri
Bir TLS sisteminin temel bileşenleri şunlardır:
- Lazer emitörü ve dedektörü — Lazer darbesi veya dalgası üretir ve yansıyan ışığı algılar
- Döner ayna sistemi — 360° yatay, 270–360° dikey tarama kapsamı sağlar
- IMU veya yerleşik eğimölçer — Cihaz eğimini kompanse eder; düzleştirme hatalarını azaltır
- Renkli kamera (isteğe bağlı) — Her noktaya RGB renk bilgisi atar; görsel analizi kolaylaştırır
- GNSS veya motorlu tabla — Koordinat referansı için; TUSAGA-Aktif ağıyla entegrasyon mümkündür
2. Teknik Özellikler — Cihaz Sınıfları
| Sınıf | Örnek Model | Ölçüm Hızı (pt/sn) | Menzil | Konum Doğruluğu | Yöntem |
|---|---|---|---|---|---|
| Uzun menzil | FARO Focus Premium | 1.000.000 | 350 m | ±3 mm | ToF |
| Orta menzil | Leica RTC360 | 2.000.000 | 130 m | ±2 mm | Phase-Shift |
| Taşınabilir | Leica BLK360 | 360.000 | 60 m | ±4 mm | Phase-Shift |
| Mobil (araç üstü) | Trimble MX9 | 1.200.000 | 200 m | ±10–20 mm | ToF |
Saha Notu: Kumlu-alüvyal zeminlerde tripod stabilizasyonu olumsuz etkilenebilir; titreşim dampenerli tripod kullanımı önerilir. Cihaz kalibrasyon tarihi düzenli kontrol edilmeli; ISO 17123-9:2018 Madde 5'e göre saha testi en az yılda bir yinelenmelidir.
3. Scan-to-BIM İş Akışı
Tam Scan-to-BIM süreci beş ana adımdan oluşur; her onay noktası ISO 19650-2:2018 uyumlu veri teslim sürecinin parçasıdır.
3.1 Adım 1 — Planlama
Tarama istasyon sayısı ve konumları proje planı üzerinde belirlenir; her noktanın en az 2–3 istasyondan görünmesi sağlanır. Komşu taramalar arasında örtüşme oranı RICS Measured Surveys 3rd Ed. Bölüm 2'ye göre en az %30 olmalıdır.
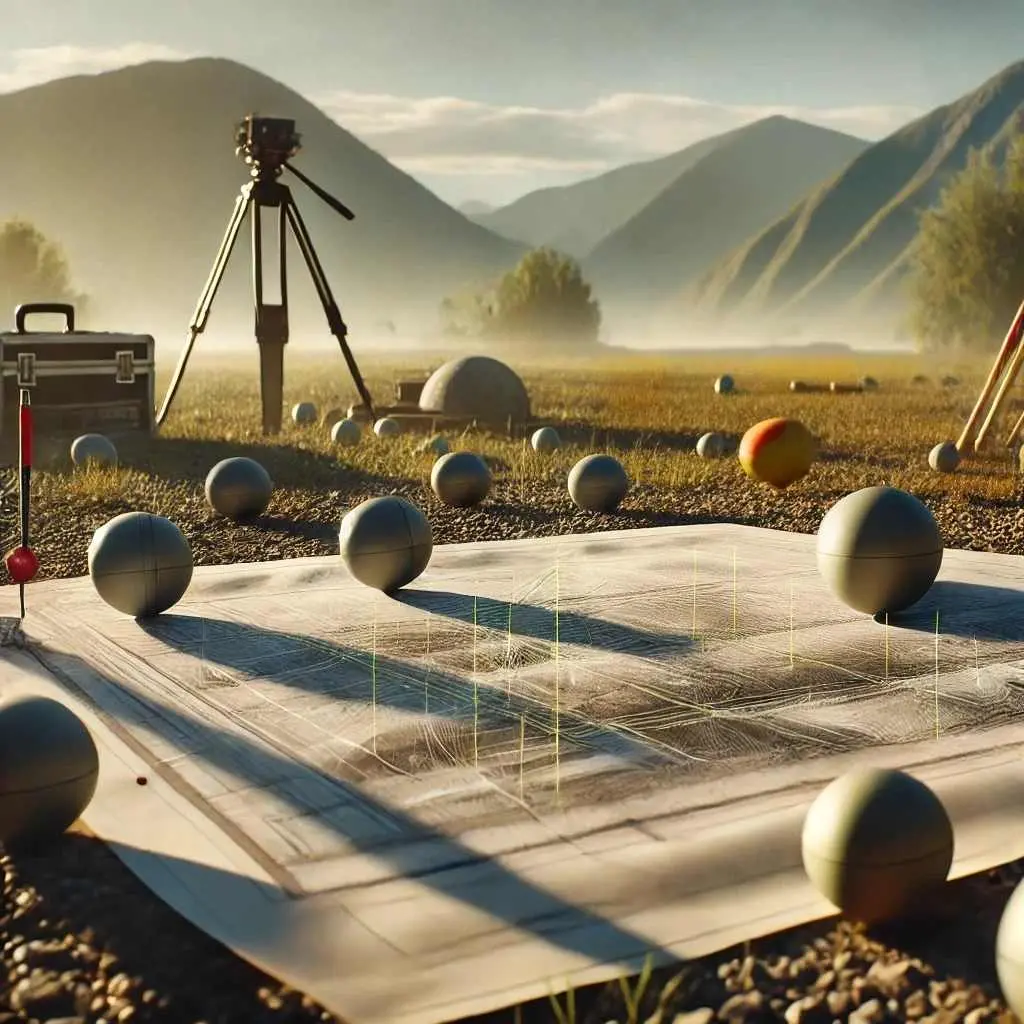
Kayıt işlemi için sabit monte edilen küre hedefler; komşu iki taramada en az 4 ortak kürenin görünmesi, kayıt RMS hatasının ≤5 mm sınırında tutulması için zorunludur.
Saha Notu: Türkiye'de sık karşılaşılan sorun: istasyon sayısı sahaya gidilmeden belirlenmemekte, yetersiz örtüşmeyle tekrar tarama gereksinimi doğmaktadır. İstanbul gibi yoğun yapılaşmış alanlarda görüş engelleri oluşabilir; %30 örtüşmeyi güvence altına almak için en az %20 fazla istasyon planlanması önerilir.
3.2 Adım 2 — Saha Ölçmesi
- Tripod üzerine kurulum; IMU ile düzleştirme kontrolü
- Hedef küre veya panel yerleştirme (zemine veya duvara sabit monte)
- Otomatik tarama başlatma; tüm istasyonlar için tekrar
- Tarama sırasında vibrasyon kaynakları (kompresör, araç geçişi) durdurulmalı
3.3 Adım 3 — Kayıt (Registration)
Komşu taramaların birleştirilmesi iki yöntemle gerçekleştirilir:
- Hedef bazlı kayıt: Bilinen marker noktaları üzerinden rijit cisim dönüşümü uygulanır
- ICP (Iterative Closest Point): Örtüşen yüzeylerden otomatik hizalama; hedefsiz uygulamalarda kullanılır
Kayıt RMS hatası BIM uygulamaları için ≤5 mm hedeflenir (ISO 19650-2:2018 Madde 5.3). RICS Measured Surveys doğruluk Band C tanımına göre ±10 mm (2σ, %95 güven) kabul edilir.
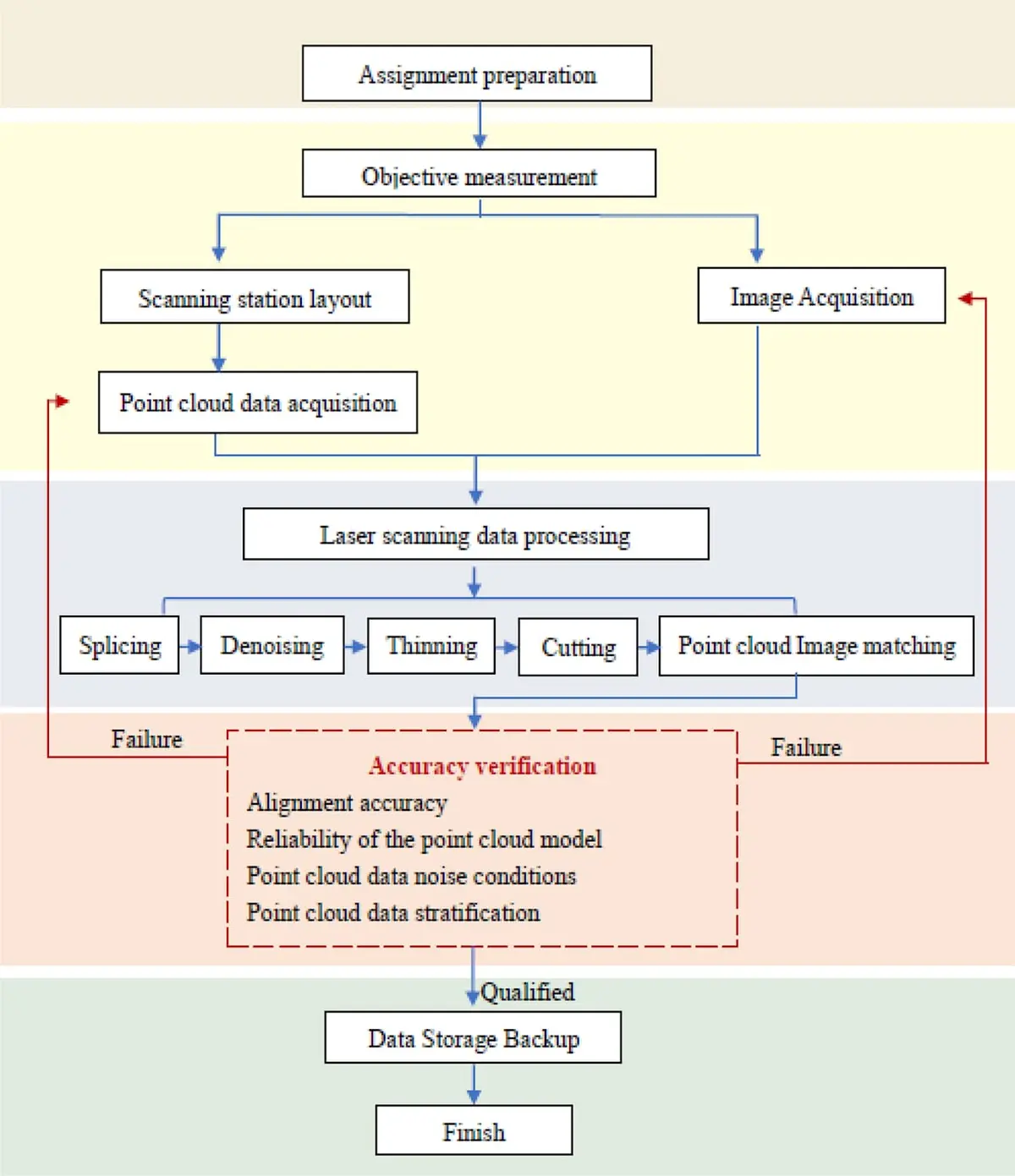
Görev hazırlığından veri arşivlemeye uzanan süreç; doğruluk doğrulama (accuracy verification) adımında hizalama doğruluğu, model güvenilirliği, gürültü düzeyi ve katmanlandırma…
Ayrıntılı açıklamayı göster
Görev hazırlığından veri arşivlemeye uzanan süreç; doğruluk doğrulama (accuracy verification) adımında hizalama doğruluğu, model güvenilirliği, gürültü düzeyi ve katmanlandırma kalitesi değerlendirilir.
3.4 Adım 4 — Post-İşleme ve Filtreleme
| İşlem | Açıklama | Araç/Yöntem |
|---|---|---|
| Gürültü filtreleme | Hayalet noktalar çıkarılır | İstatistiksel outlier kaldırma |
| Renklendirme | Kamera görüntüleri noktalara haritalanır | RGB eşleme |
| Seyrekleştirme | Çözünürlük azaltılır | Grid decimation |
| Koordinat transformasyonu | GNSS ile TUREF'e dönüşüm | TUSAGA-Aktif entegrasyonu |
| Sınıflandırma | Zemin, duvar, kolon, tavan ayrımı | Makine öğrenmesi / manuel |
Saha Notu — TUREF: BÖHHBÜY 2018 Madde 4'e göre büyük ölçekli harita üretiminde tüm koordinatların TUREF (ITRF96, 2005.0 referans epoğu) sisteminde ifade edilmesi zorunludur. TUSAGA-Aktif RTK düzeltmeleriyle lazer tarama verileri doğrudan ulusal koordinat sistemine bağlanabilir; bu işlem kentsel altyapı ve kadastro projelerinde yasal zorunluluktur.
3.5 Adım 5 — BIM Entegrasyonu
Nokta bulutu → Revit, Navisworks, Autodesk ReCap, Leica Cyclone → IFC/RVT modeli akışıyla teslim yapılır.
Scan-to-BIM sürecinde LOD (Level of Development) seviyesi proje aşamasına göre belirlenir:
| LOD | Açıklama | Uygulama |
|---|---|---|
| LOD 200 | Genel boyutlar, yaklaşık konum | Ön tasarım |
| LOD 300 | Hassas geometri, koordinasyon | Tadilatlar, uyumluluk kontrolü |
| LOD 400 | Üretim detayı | Çelik fabrikasyon, prefabrik |
| LOD 500 | Saha doğrulanmış | As-built, tesis yönetimi |
T.C. Ulaştırma ve Altyapı Bakanlığı BIM Teknik Şartnamesi Rev.03 (Eylül 2022), kamu altyapı projelerinde TS EN ISO 19650-1/2 kapsamında BIM teslim gereksinimlerini zorunlu kılmaktadır.

Üst: renklendirilmiş TLS nokta bulutu; alt: Revit'te üretilen as-built BIM modeli. İki gösterim arasındaki sapma haritası LOD 500 teslim kalitesini doğrulamak…
Ayrıntılı açıklamayı göster
Üst: renklendirilmiş TLS nokta bulutu; alt: Revit'te üretilen as-built BIM modeli. İki gösterim arasındaki sapma haritası LOD 500 teslim kalitesini doğrulamak için kullanılır.
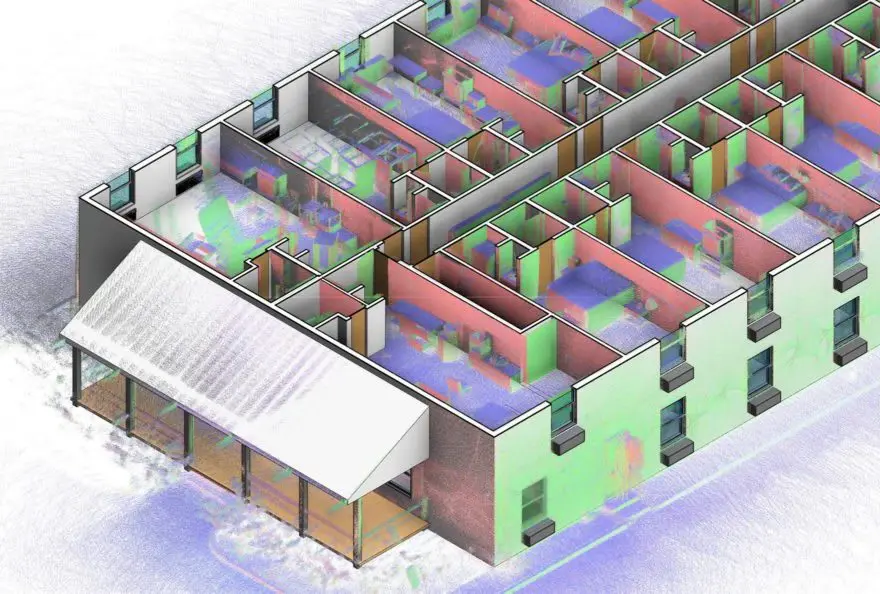
Phase-Shift tarayıcıyla elde edilen çok odalı bina iç mekan nokta bulutu; her yüzeyin renk kanalı farklı sınıf bilgisini temsil eder ve duvarlardaki geometrik sapmalar milimetre…
Ayrıntılı açıklamayı göster
Phase-Shift tarayıcıyla elde edilen çok odalı bina iç mekan nokta bulutu; her yüzeyin renk kanalı farklı sınıf bilgisini temsil eder ve duvarlardaki geometrik sapmalar milimetre hassasiyetle izlenebilir.
4. Doğruluk Analizi
4.1 Ölçüm Belirsizliği Kaynakları
| Kaynak | Büyüklük | Açıklama |
|---|---|---|
| Cihaz açı ölçümü | ±0,001°–±0,004° | Döner ayna mekanik hassasiyeti |
| Mesafe gürültüsü | ±1–5 mm | Yüzey yansıma katsayısına bağlı |
| Hedef lokalizasyonu | ±1–2 mm | Küre merkezi hesaplama hassasiyeti |
| Kayıt hatası (RMS) | ±2–10 mm | Hedef ve ICP yöntemine bağlı |
| Toplam bileşik hata | ±5–15 mm (tipik) | Kapalı bina için; dışarıda GPS etkili |
Bileşik hata, ISO 17123-9:2018 Madde 6.2'de tanımlanan belirsizlik bütçesi yaklaşımına göre quadrature toplamıyla hesaplanır:
Burada:
- — cihaz mesafe ölçüm doğruluğu (mm)
- — küre merkezi lokalizasyon hassasiyeti (mm)
- — kayıt (registration) RMS hatası (mm)
4.2 Kalite Kontrol Kriterleri
| Kriter | Limit Değer | Standart |
|---|---|---|
| Kayıt RMS hatası | ≤ 5 mm | ISO 19650-2:2018 Madde 5.3 |
| Kontrol noktası artık değeri | ≤ 8 mm | RICS Measured Surveys 3rd Ed., Band C |
| Örtüşme oranı | ≥ %30 | RICS Measured Surveys 3rd Ed., Bölüm 2 |
| Ortak hedef sayısı | ≥ 4 adet | Vosselman & Maas 2010, Bölüm 4 |
| Scan-to-BIM sapma toleransı | ≤ 5 mm | ISO 19157-1:2023 |
5. Uygulama Alanları
| Alan | Amaç | Türkiye Uygulamaları |
|---|---|---|
| As-built dokümantasyonu | Biten yapı modellemesi | Metro hatları, havalimanları |
| İmalat uygunluk kontrolü | Kolon/perde konumu, döşeme kotu | Prefabrik yapı kontrolü |
| Yapısal hasar tespiti | Çatlak haritalama, eğilme ölçümü | 6 Şubat 2023 depremleri sonrası çalışmalar |
| Tarihi yapı belgelenmesi | Kültürel miras 3B arşivi | Alman Çeşmesi, Mor Gabriel Manastırı |
| Tünel profil kontrolü | Teorik profille karşılaştırma | Karayolu ve metro tünelleri |
| Altyapı izleme | Köprü/boru hattı deformasyon takibi | Boğaz köprüleri sağlık izleme |
| Kadastro uygulamaları | 3B kadastro, parsel sınırları | TKGM LiDAR talimatı kapsamında |

Kompakt TLS cihazıyla tarihi bir kilisenin lazer taraması; temassız ölçme yöntemi hassas kültürel miras yapılarında yapısal müdahale gerektirmeden milimetre doğrulukta 3B belgeleme…
Ayrıntılı açıklamayı göster
Kompakt TLS cihazıyla tarihi bir kilisenin lazer taraması; temassız ölçme yöntemi hassas kültürel miras yapılarında yapısal müdahale gerektirmeden milimetre doğrulukta 3B belgeleme sağlar.
Saha Notu — Deprem Bağlamı: Türkiye'nin %96'sı deprem kuşağında yer alır. 6 Şubat 2023 Kahramanmaraş depremlerinin ardından TLS teknolojisi; hasarlı yapılara temassız erişim ve milimetre doğrulukla eğilme-çöküş ölçümü sağlaması nedeniyle hasar tespit süreçlerini önemli ölçüde hızlandırmıştır.
6. Örnek Problemler
Problem 1 — Bileşik Hata Hesabı
Veri:
- Cihaz mesafe doğruluğu (Phase-Shift): mm
- Hedef küre lokalizasyon hassasiyeti: mm
- Kayıt (registration) hatası: mm
İstenen: Toplam bileşik konum hatasını hesaplayın ve BIM toleransı (≤5 mm) sağlanıyor mu kontrol edin.
Çözüm:
Adım 1 — Quadrature sum formülü (ISO 17123-9:2018 Madde 6.2):
Adım 2 — Sayısal hesap:
Sonuç: mm mm — BIM toleransı sağlanmıştır.
Problem 2 — İstasyon Sayısı ve Hedef Küre Planlaması
Veri:
- Taban boyutları: m, m
- Cihaz etkin tarama çapı: m (menzil/2 × 0,7 güvenlik katsayısı)
- Örtüşme gereksinimi: ≥ %30
- Hedef sayısı: Her komşu tarama çifti için ≥ 4 ortak hedef
İstenen: Minimum istasyon sayısı ve gerekli küre hedef sayısı.
Çözüm:
Adım 1 — Tarama ızgarası belirleme:
Minimum ızgara istasyon sayısı:
Adım 2 — Örtüşme ve kapalı poligon için ek istasyonlar:
Adım 3 — Hedef küre sayısı (her 2 komşu istasyon için 4 ortak hedef):
Sonuç: 6 istasyon, yaklaşık 14 adet küre hedef (5–8 m aralıklarla dağıtılmış).
Problem 3 — TLS ve Toplam İstasyon Karşılaştırması (t-Testi)
Veri:
- TLS toplam bileşik hata: mm
- Toplam istasyon doğruluğu: mm
- Karşılaştırma: 50 noktada TLS-TS artık değerleri; ortalama mm, standart sapma mm
- Kabul kriteri: %95 güven ile mm (RICS Band C)
İstenen: t-testi ile ölçüm uyumunu değerlendirin ve sapma haritasının kabulüne karar verin.
Çözüm:
Adım 1 — Beklenen uyum belirsizliği:
Adım 2 — t-istatistiği:
Adım 3 — Kritik değer: , için (%95 güven, çift yön)
— Sistemler arası fark istatistiksel olarak anlamlıdır.
Adım 4 — Pratik kabul değerlendirmesi (2σ üst sınır):
Sonuç: mm mm (RICS Band C) — Sapma haritası kabul edilir; TLS verileri as-built BIM modellemesi için yeterli doğrulukta değerlendirilir.
7. Saha Uygulama Notları
- Yüksek yansımalı yüzeyler (cam, ayna, parlak metal) hayalet nokta üretir; bu alanlarda farklı açıdan tarama veya yansımasızlaştırıcı kaplama gerekebilir.
- Güneş ışığı etkisi: Doğrudan güneş ışığındaki açık alanlarda menzil ve doğruluk düşer; sabah erken veya bulutlu hava tercih edilmelidir.
- Veri boyutu: Nokta bulutu dosyası 1–100 GB arasına ulaşabilir; yazılım ve donanım kapasitesi proje başında kontrol edilmelidir.
- Koordinat sistemi: BÖHHBÜY 2018 kapsamındaki projelerde TUREF'e dönüşüm zorunludur; teslim belgesinde koordinat sistemi ve projeksiyon (UTM veya 3°'lik dilimler) açıkça belirtilmelidir.
- Kontrol noktaları: Kayıt kalitesi yalnızca RMS ile ifade edilmemeli; en az 3 bağımsız kontrol noktasının artık değerleri ayrıca raporlanmalıdır.
8. Temel Parametreler Özet Tablosu
| Parametre | Tipik Aralık | Birim |
|---|---|---|
| Tarayıcı mesafe doğruluğu (Phase-Shift) | ±1–3 | mm |
| Tarayıcı mesafe doğruluğu (ToF) | ±5–10 | mm |
| Kayıt RMS hatası | ±2–10 | mm |
| Örtüşme oranı (minimum) | ≥ 30 | % |
| Ortak hedef sayısı (minimum) | ≥ 4 | adet |
| Scan-to-BIM sapma toleransı | ≤ 5 | mm |
| Ölçüm hızı (orta sınıf) | 1–2 milyon | pt/sn |
| Veri boyutu (1 istasyon) | 1–10 | GB |
9. Referanslar ve Standartlar
- ISO 17123-9:2018 — Terrestrial laser scanners — Field procedures for testing geodetic and surveying instruments
- ISO 19157-1:2023 — Geographic information — Data quality — Part 1: General requirements
- ISO 19650-2:2018 — BIM information management — Delivery phase of the assets
- ASTM E2807-11 — Standard Specification for 3D Imaging Data Exchange (E57 format)
- RICS Measured Surveys of Land, Buildings and Utilities, 3rd Edition (2014)
- BÖHHBÜY 2018, Madde 4, 45 — TUREF koordinat sistemi, detay ölçme doğruluğu
- T.C. Ulaştırma ve Altyapı Bakanlığı BIM Teknik Şartnamesi Rev.03, Eylül 2022
- TKGM 3D Lazer Tarama (LiDAR) Talimatı, 2020
- Vosselman, G. ve Maas, H.G. (2010). Airborne and Terrestrial Laser Scanning. Whittles Publishing.
- Aryan, A. vd. (2021). "Planning for terrestrial laser scanning in construction." Automation in Construction, 132.
- Mill, T.; Alt, A.; Liias, R. (2013). "Combined 3D building surveying techniques." Journal of Civil Engineering and Management, 19(S1).
Kaynakça
- İlgili Türk Standartları (TS) ve Avrupa Normları (EN)
- TBDY 2018 — Türkiye Bina Deprem Yönetmeliği
- İlgili ders kitapları ve teknik kaynaklar
Not: Bu makale eğitim amaçlıdır. Projelerde güncel yönetmelik ve standartlara başvurunuz.
Kaynaklar
- BÖHHBÜY 2018.
- Harita ve Ölçme.
Önemli Mühendislik Uyarısı: Bu içerik yalnızca bilgilendirme amaçlıdır; nihai tasarım, hesap ve uygulama kararları, güncel yönetmelikler ile proje koşulları çerçevesinde yetkili bir inşaat mühendisinin denetiminde alınmalıdır. Sayısal örnekler ve formüller genel mühendislik pratiğini yansıtır; her projenin kendine özgü zemin, yük ve çevre koşulları proje müellifince ayrıca değerlendirilmelidir.
Yersel Lazer Tarama ve Nokta Bulutu — Sıkça Sorulan Sorular
TLS'de hangi mesafe ölçüm yöntemleri kullanılır ve hangisi iç mekana uygundur?
Scan-to-BIM sürecinde kayıt (registration) RMS hatası ne kadar olmalıdır?
Türkiye'deki TLS projelerinde koordinat sistemi gereklilikleri nelerdir?
Çoklu istasyon taramalarında komşu taramalar arasında ne kadar örtüşme gerekir?
Kaynaklar, sürüm ve alıntılamaAkademik ve mesleki kullanım için atıf ayrıntılarını açın.
[object Object] (2026). Yersel Lazer Tarama ve Nokta Bulutu. Yapıdan — İnşaat Mühendisliği Bilgi Portalı. https://yapidan.com/kategoriler/ho/yersel-lazer-tarama-nokta-bulutu