GNSS/GPS Ölçme — RTK ve Statik Yöntemler
GNSS/GPS Ölçme — RTK ve Statik Yöntemler için temel kavramları, uygulama adımları ve kritik mühendislik kontrollerini özetleyen pratik rehber.
Yapıdan Editör Kurulu · Editoryal kaynak kontrolündeEditoryal kaynak kontrolü kaydı varAyrıntılar
- Hazırlayan
- Yapıdan Editör Kurulu
- Teknik/Editoryal kontrol
- Teknik doğrulama bekliyor
- Son kontrol tarihi
- Teknik doğrulama bekliyor
- İçerik sürümü
- 3.0
- Kaynak durumu
- Editoryal kaynak kontrolü kaydı var
Sorumluluk/kapsam: Bu içerik genel bilgilendirme ve editoryal kaynak kontrolü amacıyla hazırlanır; proje, saha veya uygulama kararı için yetkili mühendis/kurum değerlendirmesinin yerine geçmez.
Küresel Uydu Navigasyon Sistemleri (GNSS), yer yüzeyindeki noktaların üç boyutlu koordinatlarını yüksek doğrulukla belirlemeye yarayan ölçme teknolojilerinin bütününü kapsar. Türkiye'deki mühendislik uygulamalarında GPS (ABD), GLONASS (Rusya), Galileo (AB) ve BeiDou (Çin) uydu takımyıldızları birlikte kullanılmakta; BÖHHBÜY 2018 kapsamındaki kadastral, aplikasyon ve ağ ölçmeleri TKGM Teknik Şartnamesi'ne göre yürütülmektedir. Bu makale, statik GNSS ve RTK yöntemlerini temel kavramlardan saha uygulamasına kadar açıklamaktadır.

Çift frekanslı alıcı, iki anten ve data kontrolörden oluşan profesyonel RTK sistemi; tek operatörle cm doğrulukta anlık koordinat belirleme sağlar.
1. GNSS Temel Kavramlar
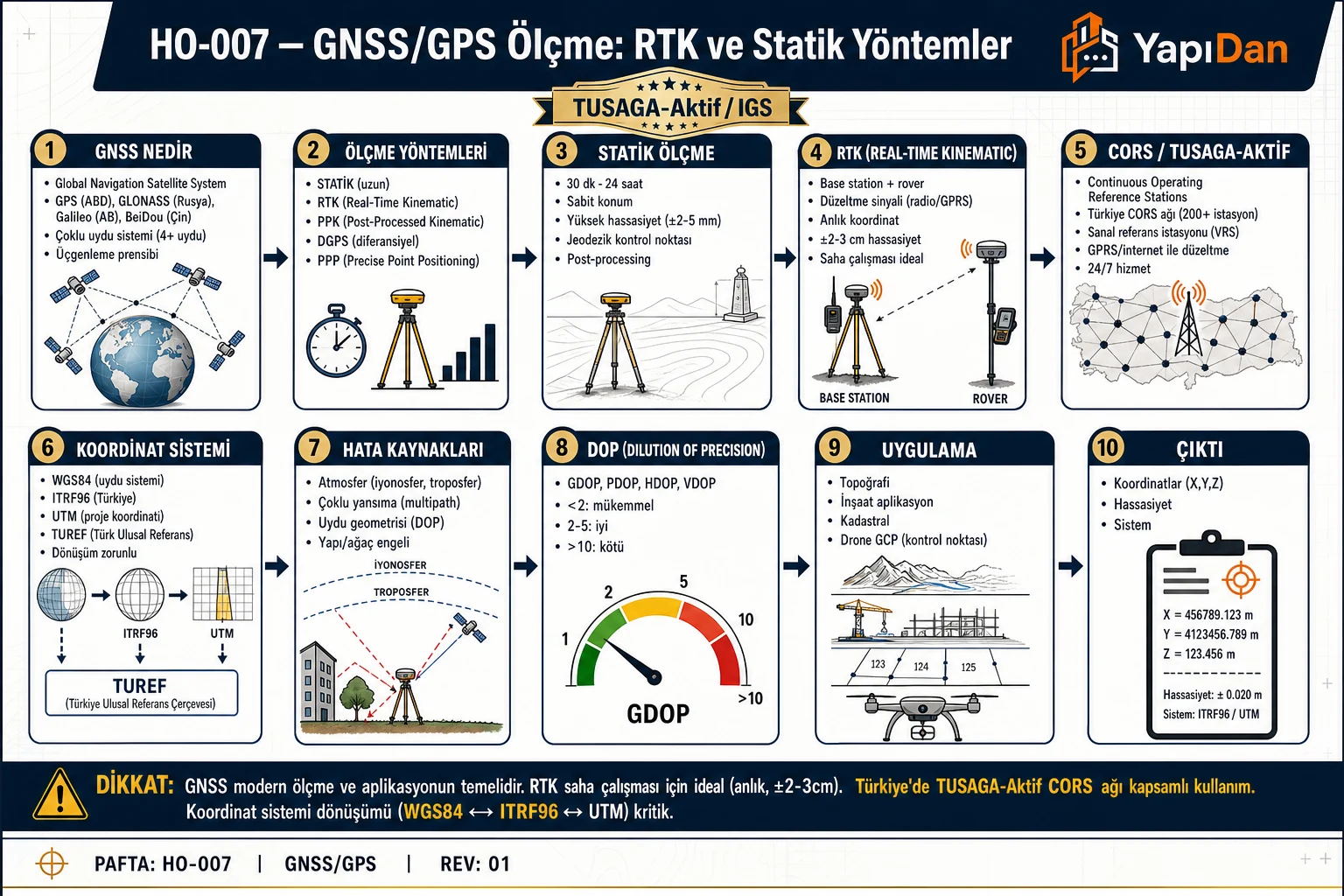
GNSS sistemleri (GPS/GLONASS/Galileo/BeiDou) → ölçme yöntemleri (statik 30dk-24h ±2-5mm, RTK anlık ±2-3cm, PPK, DGPS, PPP) → CORS TUSAGA-Aktif (200+ istasyon, VRS, GPRS) →…
Ayrıntılı açıklamayı göster
GNSS sistemleri (GPS/GLONASS/Galileo/BeiDou) → ölçme yöntemleri (statik 30dk-24h ±2-5mm, RTK anlık ±2-3cm, PPK, DGPS, PPP) → CORS TUSAGA-Aktif (200+ istasyon, VRS, GPRS) → koordinat sistemleri (WGS84/ITRF96/UTM/TUREF) → DOP (<2 mükemmel) → uygulama (kadastral, inşaat, drone GCP).
1.1 Uydu Sistemi Yapısı
Bir GNSS sistemi üç ana segmentten oluşur:
- Uzay segmenti: Orta Yer Yörüngesi'nde (MEO, ~20.200 km) hareket eden uydu takımyıldızı
- Kontrol segmenti: Ana kontrol istasyonları ve yer izleme ağı
- Kullanıcı segmenti: Alıcılar ve işleme yazılımları
Türkiye'de yaygın kullanılan sistemler ve mevcut uydu sayıları:
| Sistem | Ülke | Yörünge Yüksekliği | Aktif Uydu |
|---|---|---|---|
| GPS (L1/L2/L5) | ABD | 20.200 km | 31 |
| GLONASS (G1/G2) | Rusya | 19.100 km | 24 |
| Galileo (E1/E5) | AB | 23.222 km | 30 |
| BeiDou (B1/B2) | Çin | 21.528 km (MEO) | 35 |
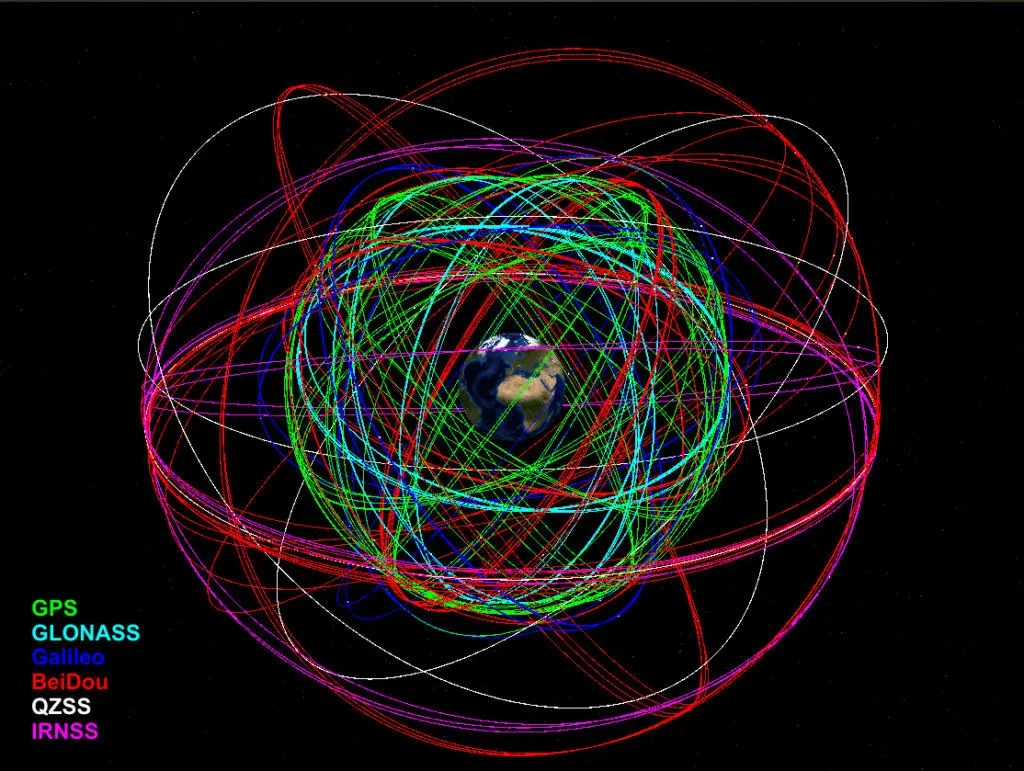
Dört ana GNSS sisteminin yörünge düzlemleri; çoklu takımyıldız kullanımı özellikle kentsel kanyonlarda görünür uydu sayısını artırarak DOP değerini iyileştirir.
1.2 Ölçme Yöntemleri: Kod ve Faz
GNSS alıcıları iki temel yöntemle mesafe ölçer:
Kod (pseudorange) ölçümü: Uydudan gelen C/A veya P(Y) kod sinyalinin alıcıya ulaşma süresi ölçülür; doğruluk ±1–5 m düzeyindedir ve navigasyonda kullanılır.
Taşıyıcı faz ölçümü: L1 (1575,42 MHz) veya L2 (1227,60 MHz) taşıyıcı dalgasının faz kayması ölçülür; belirsizlik (ambiguity) çözümü sonrası mm–cm doğruluğa ulaşılır.
1.3 Hata Kaynakları
| Hata Kaynağı | Büyüklük | Azaltma Yöntemi |
|---|---|---|
| Uydu saat hatası | ~2 m | Çift fark ölçümü |
| Efemeris hatası | ~1–2 m | Kesin efemeris (IGS) |
| İyonosfer gecikmesi | 1–50 m | İkili frekans (L1/L2) |
| Troposfer gecikmesi | 0,5–2,5 m | Model düzeltmesi (Hopfield) |
| Çok yollu yansıma | 0,5–5 m | Anten tasarımı, engelsiz yer |
| Alıcı gürültüsü | ~0,5 mm | Kaliteli donanım |
| PDOP etkisi | Çarpan | Uydu geometrisi iyileştirme |
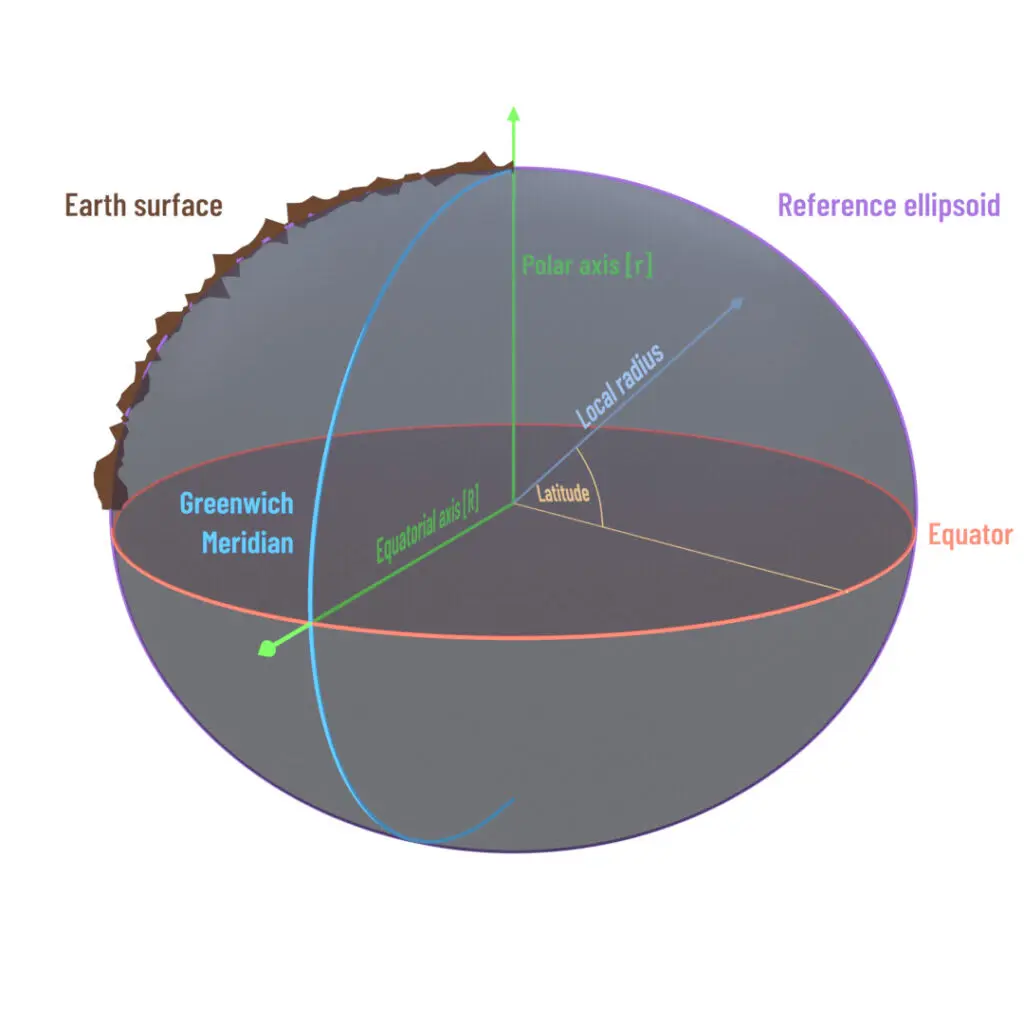
GNSS ölçümleri WGS84 elipsoidi üzerinde elipsoid yüksekliği (h) cinsinden üretilir; mühendislik uygulamaları için jeoid ondülasyonu (N) aracılığıyla ortometrik yüksekliğe (H)…
Ayrıntılı açıklamayı göster
GNSS ölçümleri WGS84 elipsoidi üzerinde elipsoid yüksekliği (h) cinsinden üretilir; mühendislik uygulamaları için jeoid ondülasyonu (N) aracılığıyla ortometrik yüksekliğe (H) dönüştürülmelidir.
2. Statik GNSS Ölçmesi
2.1 Yöntem Tanımı
Statik GNSS yönteminde alıcılar belirli noktalara yerleştirilerek uzun süreli veri kaydeder; kayıt tamamlandıktan sonra ofis ortamında post-işleme yazılımıyla çözüm yapılır. Çift fark gözlem denklemi hataların büyük bölümünü eleme yolunu açar:
Bu denklemde:
- — r ve s alıcıları, i ve j uydular arasındaki çift fark faz ölçümü (m)
- — geometrik mesafe çift farkı (m)
- — taşıyıcı dalga boyu (L1 ≈ 0,1903 m)
- — tam dalga belirsizliği çift farkı (boyutsuz tamsayı)
- — iyonosfer gecikmesi çift farkı (m)
- — troposfer gecikmesi çift farkı (m)
2.2 BÖHHBÜY Ölçme Süreleri
BÖHHBÜY 2018 Madde 19, şebeke sınıfına göre minimum ölçme sürelerini belirler:
| Şebeke Sınıfı | Minimum Süre | Taban Uzunluğu | Doğruluk |
|---|---|---|---|
| C1 — Ulusal ağ | ≥ 2 saat | > 100 km | 1–2 ppm |
| C2 — Bölgesel ağ | ≥ 45 dakika | 10–100 km | 2–5 ppm |
| C3 — Yerel ağ | ≥ 20 dakika | < 10 km | 5–10 ppm |
| C4 — Kadastral | ≥ 10 dakika | < 5 km | ≤ 5 cm |
2.3 Anten Yükseklik Ölçümü
Statik ölçmelerde anten yüksekliğinin hatalı ölçülmesi, düşey koordinat hatasına doğrudan yansır. BÖHHBÜY Madde 14e gereği anten yüksekliği ölçüm başında ve sonunda olmak üzere en az iki kez ölçülmeli ve fark 2 mm'yi geçmemelidir.
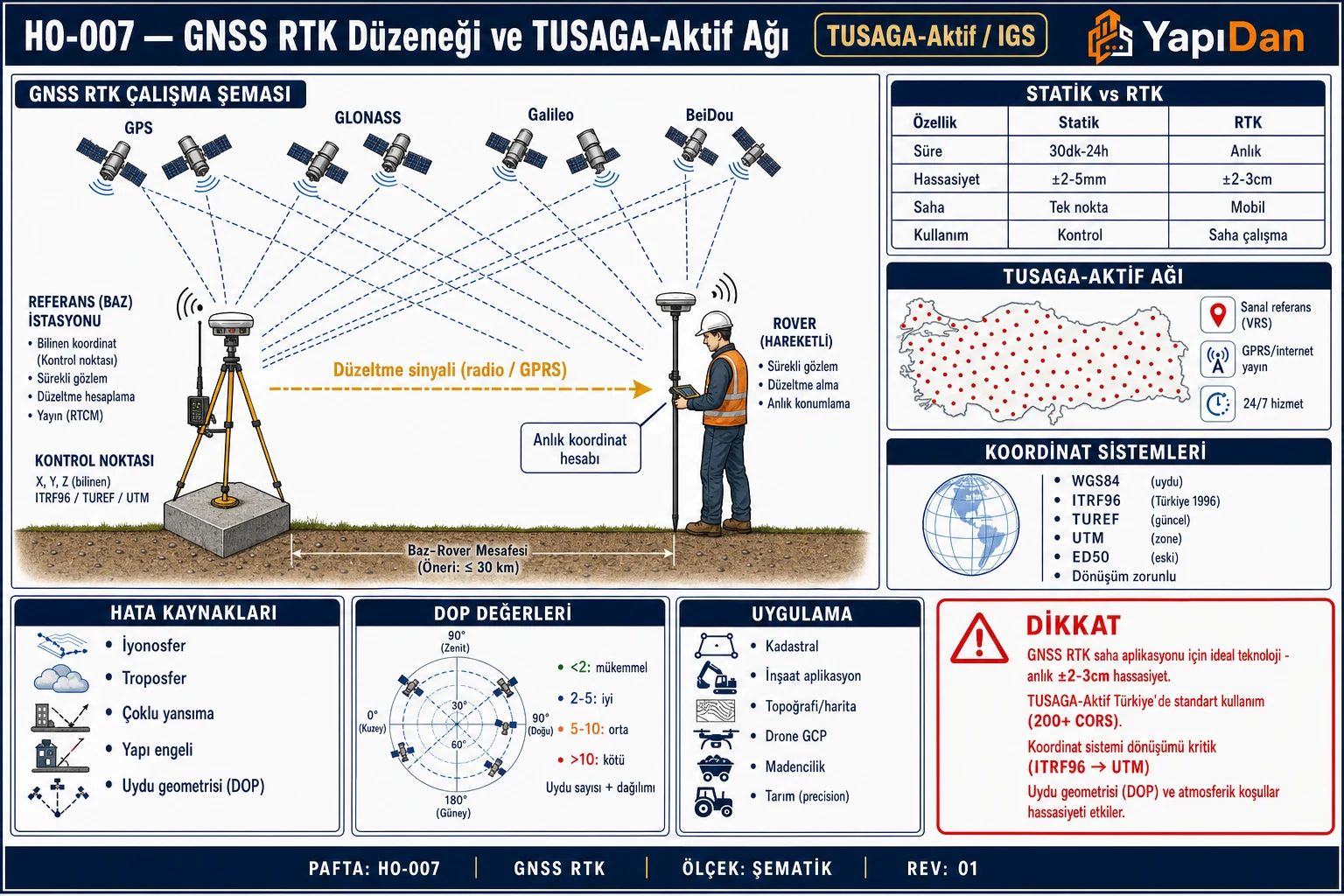
RTK çalışma şeması (uydular + base + rover + düzeltme sinyali); statik vs RTK karşılaştırma; TUSAGA-Aktif Türkiye haritası (200+ CORS istasyon); koordinat sistemleri…
Ayrıntılı açıklamayı göster
RTK çalışma şeması (uydular + base + rover + düzeltme sinyali); statik vs RTK karşılaştırma; TUSAGA-Aktif Türkiye haritası (200+ CORS istasyon); koordinat sistemleri (WGS84/ITRF96/TUREF/UTM); DOP değerleri ve hata kaynakları (atmosfer, çoklu yansıma); uygulama alanları.
Slant mesafe ölçüldüğünde düşey anten yüksekliği aşağıdaki bağıntıyla hesaplanır:
Burada:
- — ARP'den datum noktasına düşey anten yüksekliği (m)
- — eğik (slant) ölçülen mesafe (m)
- — anten yarıçapı (m, üretici dokümantasyonundan alınır)
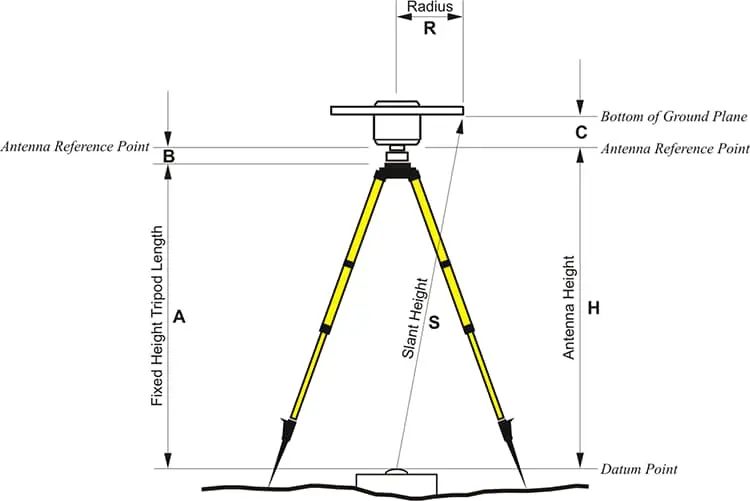
Eğik mesafe (S) ve anten yarıçapı (R) üçgen ilişkisi; ARP'den zemin datum noktasına düşey mesafe (h) Pisagor bağıntısıyla hesaplanır.
2.4 Post-İşleme Yazılımları
| Yazılım | Lisans | Özellikler |
|---|---|---|
| Bernese GNSS 5.4 | Ticari | IGS kalitesinde hassas efemeris, troposfer modeli |
| GAMIT/GLOBK | Akademik | Jeofizik uygulamaları, sürünme analizi |
| Leica Infinity | Ticari | Ürün entegrasyonu, network analizi |
| Trimble Business Center | Ticari | İnşaat/kadastro odaklı |
| RTKLIB | Açık kaynak | Kod/faz işleme, PPP, akademik kullanım |
3. RTK GNSS Ölçmesi
3.1 TUSAGA-Aktif CORS Ağı
Türkiye'nin Sürekli Çalışan GNSS Ağı (TUSAGA-Aktif), Harita Genel Müdürlüğü (HGM) ve TKGM tarafından işletilen 158 sabit GNSS istasyonundan oluşur. İstasyonlar yaklaşık 80–100 km aralıklarla konumlandırılmıştır; 24/7 kesintisiz veri yayını NTRIP protokolüyle gerçekleştirilir.
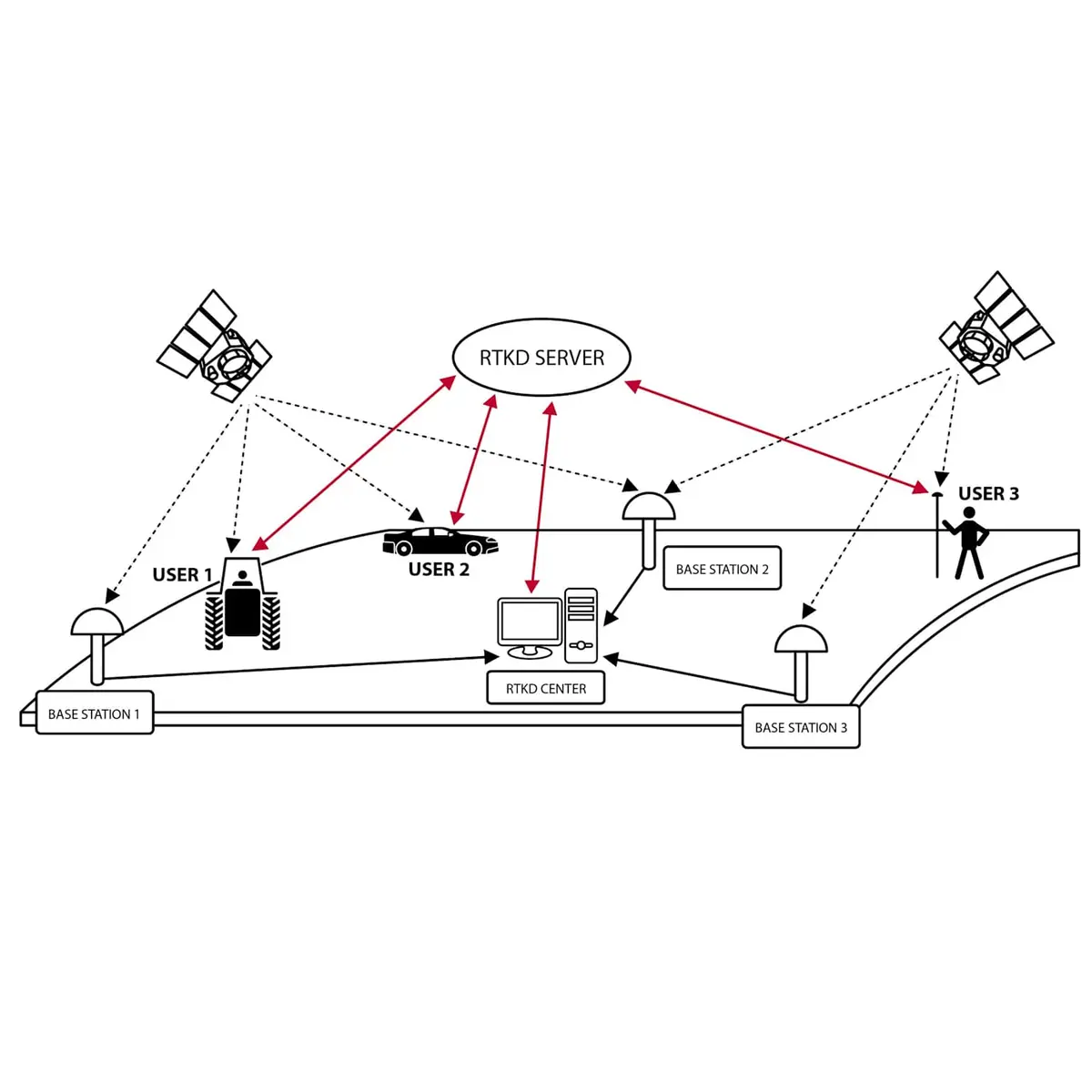
Sabit baz istasyonlarından toplanan ham veriler RTKD sunucusunda işlenerek ağ düzeltmeleri hesaplanır; rover kullanıcılar NTRIP istemcisi üzerinden anlık düzeltme alır.
3.2 Düzeltme Yöntemleri
TUSAGA-Aktif üç farklı ağ RTK düzeltme yöntemi sunar:
| Yöntem | Açıklama | Uygunluk |
|---|---|---|
| VRS (Virtual Reference Station) | Rover konumuna göre sanal baz üretir | Genel mühendislik |
| FKP (Flächen-Korrektur-Parameter) | Alan düzeltme parametreleri yayını | Geniş bölge ölçümü |
| MAC (Master Auxiliary Concept) | Ana ve yardımcı istasyon konsepti | Uzak bölge ölçümü |
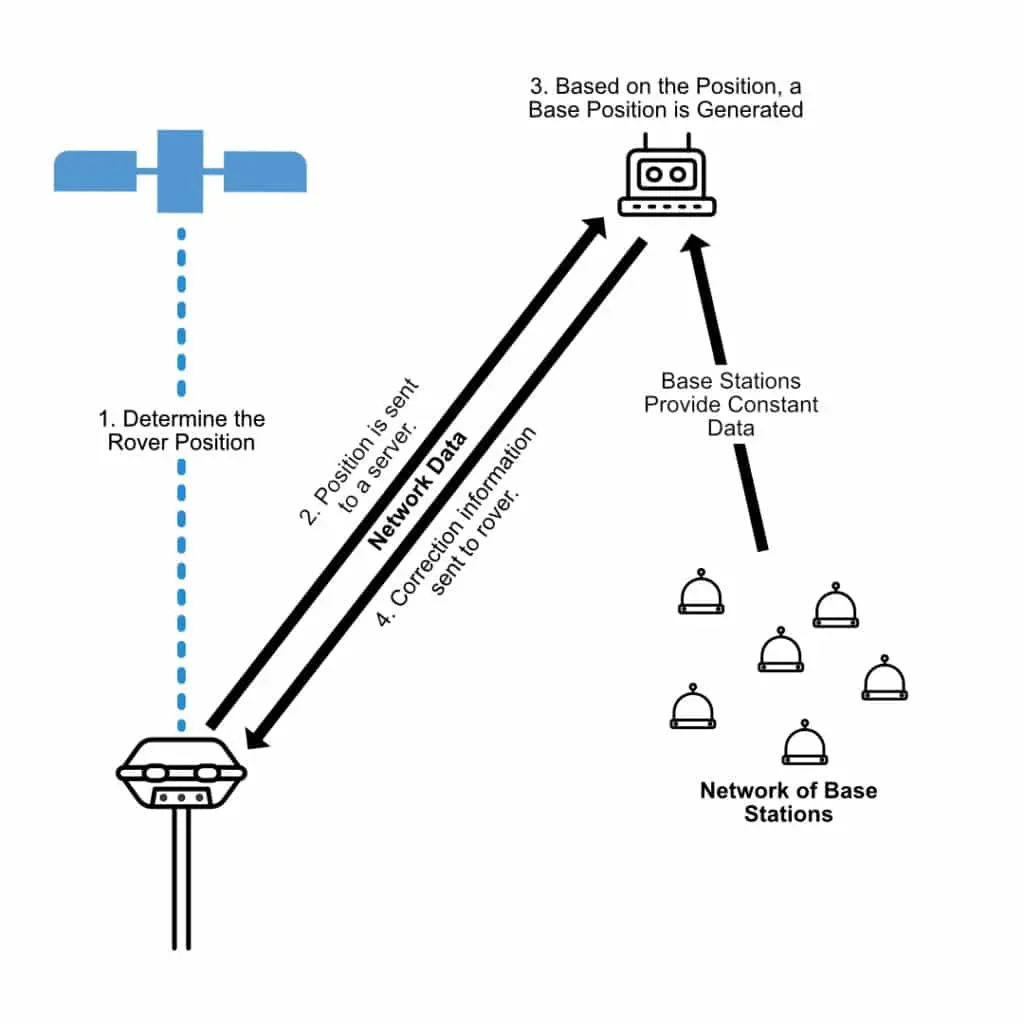
Dört adımlı VRS süreci: rover yaklaşık konumunu sunucuya gönderir, sunucu en yakın istasyonlar arası interpolasyonla sanal baz üretir ve rover'a RTCM düzeltme akışı iletir.
3.3 DOP Değerleri ve Uydu Geometrisi
DOP (Dilution of Precision), uyduların gökyüzündeki geometrik dağılımının konum belirsizliğine etkisini sayısal olarak ifade eden boyutsuz bir katsayıdır. DOP değeri küçüldükçe uydu geometrisi iyileşir ve konum doğruluğu artar.
Burada , , konum belirsizliği kovaryans matrisinin köşegen elemanlarının kareköküdür. BÖHHBÜY ve TUSAGA-Aktif şartnamesine göre ölçüm sırasında koşulu sağlanmalıdır.
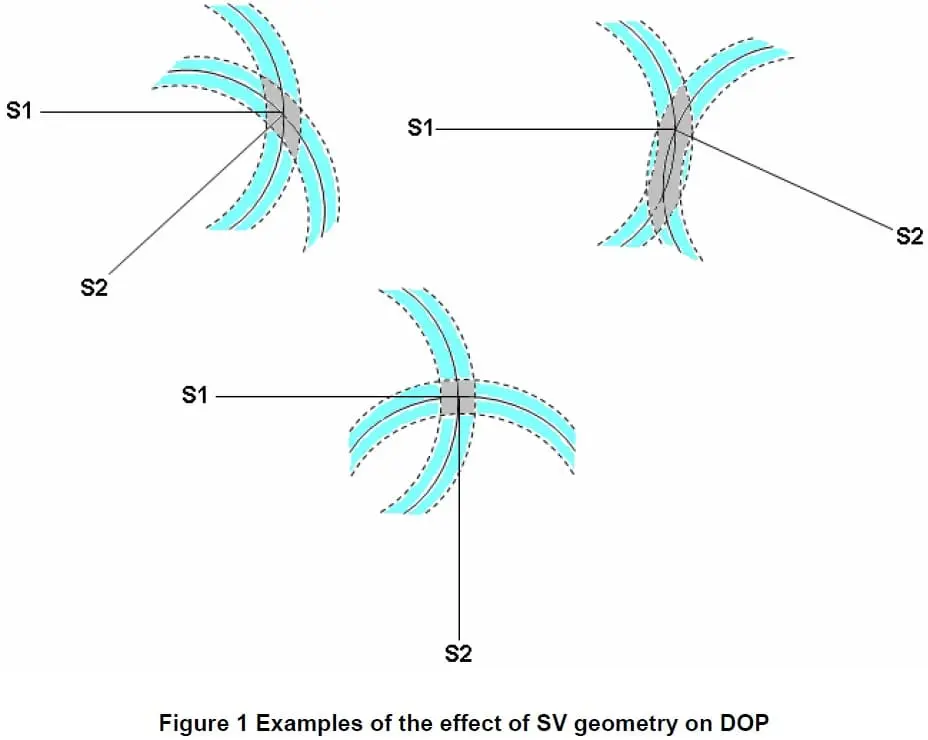
Uydular gökyüzüne geniş açıyla dağıldığında kesişme geometrisi iyileşir ve PDOP değeri küçülür; kentsel kanyonlarda veya dağlık arazide görünür uydu sayısı azalarak DOP yükselir.
DOP türleri ve anlamları:
| DOP Türü | Kapsam | İyi Değer | Kabul Edilebilir |
|---|---|---|---|
| PDOP | 3B konum (X, Y, Z) | < 3 | ≤ 4 |
| HDOP | Yatay konum (X, Y) | < 2 | ≤ 3 |
| VDOP | Düşey konum (Z) | < 3 | ≤ 5 |
| TDOP | Saat hatası | < 2 | ≤ 3 |
| GDOP | Geometrik (4B) | < 4 | ≤ 6 |
3.4 RTK Ölçüm Protokolü
BÖHHBÜY Madde 26 ve TKGM Teknik Şartnamesi'ne göre RTK ölçümünde uyulması gereken kurallar:
- Ön koşullar: PDOP ≤ 4, görünür uydu sayısı ≥ 5 (tercihen ≥ 7), sinyal engeli yok
- Fix çözüm: Yalnızca "Fix" (tamsayı ambiguity çözülmüş) statüsünde ölçüm kabul edilir; "Float" ve "DGPS" reddedilir
- Başlatma: Alıcı açıldıktan sonra fix çözüme ulaşmak için 1–3 dakika beklenir
- Ölçüm tekrarı: Her noktada en az 3 epok (saniye) gözlem, tekrarlı ölçümler arasındaki fark ≤ 3 cm
- Kontrol noktası: Her seansta bilinen koordinatlı noktada kontrol ölçümü yapılır; tolerans ≤ 3 cm
- Kayıt: Nokta kodu, anten yüksekliği, ölçüm zamanı, uydu sayısı ve PDOP değeri zorunlu olarak kaydedilir
4. Yükseklik Dönüşümü: Elipsoid'ten Ortometrik Yüksekliğe
GNSS, elipsoid yüksekliği (h) üretir. Mühendislik uygulamalarında kullanılan ortometrik yükseklik (H) ise deniz seviyesini temsil eden jeoid yüzeyine göre tanımlanır.
Burada:
- — ortometrik yükseklik (m), deniz seviyesine göre
- — elipsoid yüksekliği (m), GNSS ile elde edilen
- — jeoid ondülasyonu (m), jeoid modelinden alınan düzeltme
Türkiye'de kullanılan jeoid modelleri:
| Model | Kapsam | Doğruluk | Durum |
|---|---|---|---|
| TG-03 | Türkiye geneli | ±15–30 cm | Arşiv |
| TG-09 | Türkiye geneli | ±5–15 cm | Güncel (aktif) |
| TG-11 | Geliştirilmiş | ±3–8 cm | Test aşaması |
Yükseklik doğruluk toleransı:
Burada baz uzunluğudur (km cinsinden). Örneğin 5 km tabanlı ölçümde izin verilen yükseklik farkı mm'dir.
5. GNSS Akış Diyagramı
Aşağıdaki diyagram, GNSS ölçme yöntemi seçiminden saha uygulamasına ve veri işlemeye kadar izlenen süreç adımlarını özetlemektedir.
6. Örnek Problemler
Örnek 1 — Anten Yüksekliği Hesabı
Veri: Slant ölçümü m, anten yarıçapı m (üretici kılavuzundan).
İstenen: Düşey anten yüksekliği .
Çözüm:
Sonuç: Düşey anten yüksekliği m olarak kaydedilir. İlk ve son ölçüm farkı mm koşulu sağlanmalıdır.
Örnek 2 — Yükseklik Toleransı Kontrolü
Veri: İki sabit nokta arasında RTK ile ölçülen baz uzunluğu km; elde edilen yükseklik farkı m; nivelman ile belirlenen referans yükseklik farkı m.
İstenen: RTK yükseklik ölçümü toleransı sağlıyor mu?
Çözüm:
Sonuç: Yükseklik toleransı aşılmıştır. Jeoid modeli (TG-09) yeniden uygulanmalı ve ölçüm tekrarlanmalıdır.
Örnek 3 — RTK Kontrol Noktası Değerlendirmesi
Veri: Bilinen koordinatları m, m olan kontrol noktasında RTK ile m, m ölçülmüştür.
İstenen: Yatay konum farkı ve tolerans kontrolü.
Çözüm:
Sonuç: TKGM şartnamesine göre RTK kontrol noktası toleransı 3 cm'dir. Hesaplanan cm cm olduğundan ölçüm kabul edilebilir.
7. Saha Uygulama Notları
- Çok yollu etki: Anten, metal yüzeylerden ve duvarlardan en az 2 m uzakta konumlandırılmalıdır. Zemin düzlemi (ground plane) veya çukur anten tipi çok yollu etkiyi önemli ölçüde azaltır.
- NTRIP bağlantısı: Sahada GSM/3G/4G kapsama alanı dışında kalındığında RTK ölçümü yapılamaz; bu durumlarda Statik GNSS veya total station kombinasyonu önerilir.
- Başlatma kalitesi: RTK başlatma kalitesi düşük güven indeksine sahipse (Q > 2) Fix çözümü reddedilmeli, anten kaldırılıp yeniden başlatma yapılmalıdır.
- Dönemsel koordinat kaydı: Uzun RTK ölçüm oturumlarında her 10 noktada bir bilinen koordinatlı noktaya gidilerek kontrol yapılması sistemik hataları erkenden tespit eder.
- Yükseklik anten ofsetleri: Farklı anten tipleri farklı ARP-APC ofsetlerine sahiptir; yazılımda doğru anten kalibrasyonu (IGS antex formatı) seçilmezse cm düzeyinde sistematik hata oluşur.
- Veri yedekleme: Saha bilgisayarı ve kontrolör verileri günlük olarak yedeklenmeli; orijinal ham veriler arşivlenmelidir.
8. Referanslar ve Standartlar
- BÖHHBÜY 2018, Madde 14e, 19, 22, 26 — Anten yüksekliği, ölçme süreleri, RTK protokolü
- ISO 17123-8:2015 — Field procedures for testing geodetic and surveying instruments — GNSS field measurement systems in real-time kinematic (RTK)
- TKGM GNSS Teknik Şartnamesi 2021 — Kadastral GNSS ölçme kuralları
- TUSAGA-Aktif Kullanım Kılavuzu — NTRIP ayarları, VRS/FKP/MAC yöntemleri
- HGM TG-09 Jeoid Modeli Kullanım Kılavuzu — Yükseklik dönüşümü
- IGS Antex Dosyası (igs14.atx) — Anten faz merkezi kalibrasyonları
- Seeber, G. (2003). Satellite Geodesy. Walter de Gruyter, Berlin.
Kaynakça
- İlgili Türk Standartları (TS) ve Avrupa Normları (EN)
- TBDY 2018 — Türkiye Bina Deprem Yönetmeliği
- İlgili ders kitapları ve teknik kaynaklar
Not: Bu makale eğitim amaçlıdır. Projelerde güncel yönetmelik ve standartlara başvurunuz.
Kaynaklar
- BÖHHBÜY 2018.
- Harita ve Ölçme.
Önemli Mühendislik Uyarısı: Bu içerik yalnızca bilgilendirme amaçlıdır; nihai tasarım, hesap ve uygulama kararları, güncel yönetmelikler ile proje koşulları çerçevesinde yetkili bir inşaat mühendisinin denetiminde alınmalıdır. Sayısal örnekler ve formüller genel mühendislik pratiğini yansıtır; her projenin kendine özgü zemin, yük ve çevre koşulları proje müellifince ayrıca değerlendirilmelidir.
GNSS/GPS Ölçme — RTK ve Statik Yöntemler — Sıkça Sorulan Sorular
RTK ölçümünde hangi PDOP değeri zorunludur?
Statik GNSS ölçmesinde C4 (kadastral) şebeke için minimum ölçme süresi nedir?
TUSAGA-Aktif CORS ağı kaç istasyondan oluşmaktadır?
GNSS ile elde edilen elipsoid yüksekliği ortometrik yüksekliğe nasıl dönüştürülür?
RTK ölçümünde 'Fix' çözüm zorunlu mudur?
Kaynaklar, sürüm ve alıntılamaAkademik ve mesleki kullanım için atıf ayrıntılarını açın.
[object Object] (2026). GNSS/GPS Ölçme — RTK ve Statik Yöntemler. Yapıdan — İnşaat Mühendisliği Bilgi Portalı. https://yapidan.com/kategoriler/ho/gnss-gps-olcme-rtk-statik-yontemler